Her finder du eksempler på, hvordan en micro:bit robotbil kan styres ved hjælp af programmering i MakeCode og diverse sensorer.
Materialeliste
Det skal du bruge:
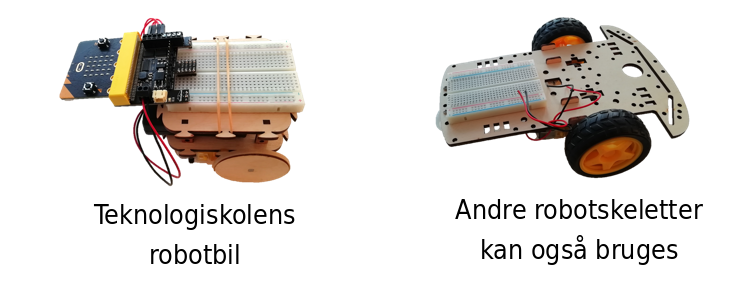
Hvis du har Teknologiskolens teknologikasse har du allerede et skelet til din robotbil samt alle komponenterne, som vi vil benytte i denne guide. Hvis du har brug for hjælp til at samle den, kan du følge en videoguide ved at klikke her.
Hvis du ikke har teknologikassen, kan du stadig benytte denne guide. Det vigtige er, at du har et "robotskelet", hvor motorer, hjul, breadboard og batteriholder kan sættes fast, og anskaffer dig de komponenter, der er angivet i materialelisten ovenfor.
Den første del af guiden giver eksempler på hvordan robotbilen kan styres uden ekstra komponenter, altså kun ved brug af micro:biten og programmering i MakeCode. Derefter kommer der eksempler på, hvordan forskellige sensorer kan benyttes til at gøre bilen mere smart og selvstændig.
FireFly
I denne guide bruger vi FireFly til at forbinde micro:biten til breadboardet, så vi lettere kan tilslutte motorer og senere sensorer. Hvis du vil vide mere om FireFly, er der en introduktion på linket her. Via linket kan du også se, hvordan FireFlyen skal placeres på breadboardet, hvor og hvordan batteripakken skal tilsluttes, samt hvor motorerne skal tilsluttes.
Hvordan bruges FireFly med MakeCode?
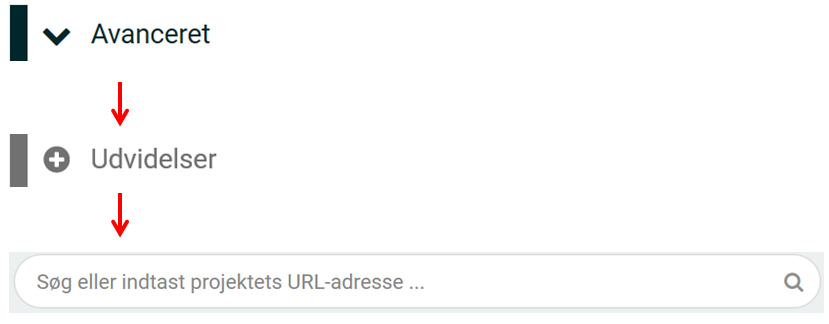
For at bruge FireFlyen i MakeCode skal vi først hente den som en udvidelse. I MakeCode tryk på avanceret i menuen i midten. Nede i bunden ligger udvidelser, og når du trykker på den kommer der blandt andet et søgefelt op, som vi skal indsætte linket til FireFly udvidelsen i.
Kopier og indsæt dette link: https://github.com/teknologihusetDK/FireFly
Denne udvidelse dukker op, som indeholder de nye blokke til FireFly.
Ude i MakeCode menuen skulle du nu gerne have en ny kategori kaldet "FireFly".
Hver gang du laver et nyt projekt, hvor du skal bruge FireFly, skal du huske at hente udvidelsen igen.
Hvordan tilsluttes komponenter?
Når vi skal bruge sensorer og andre komponenter skal vi lave forbindelse til micro:biten via breadboardet og FireFlyen. Hvordan hver enkelt sensor fra Teknologiskolens kasse (eller materialelisten) tilsluttes FireFlyen kan du slå op i guiden ved at klikke her.
Via linket kan du også finde hjælp til hvis din motor kører baglæns, når du i MakeCode har sagt, den skal køre fremad eller omvendt. Dette kan du læse om under DC-motor.
Styr bilen uden komponenter
For at styre micro:bit bilen skal vi fortælle den, hvad den skal gøre ved at give den præcise instruktioner i MakeCode. Når vi giver instruktioner til micro:biten om, at den skal reagere på noget lader vi den reagere på input. Eksempler på inputs, som micro:biten kan reagere på er tryk på knapper, lys, rysten, temperatur, og hvis du har version 2 af micro:bit kan den også reagere på lyd.
I opgaverne herunder finder du eksempler på, hvordan bilen kan styres kun ved hjælp af forskellige typer input uden tilsluttede komponenter.
Styr med knapper
Et tryk på knap A får bilen til at køre fremad. Et tryk på knap B får den til at køre baglæns. Et tryk på knap A og B samtidigt får bilen til at standse. Hvis du vil gøre det lettere at ændre hastigheden i din kode, kan du gøre hastigheden til en variabel.
Styr med lys
I eksemplet her kan du få din bil til at køre, hvis du lyser på micro:bitens skærm med fx en lommelygte eller en mobil. Mens der lyses på micro:biten, vil bilen køre fremad, og standse når der ikke lyses på den.
Jo højere lysstyrke på micro:bitens skærm desto højere værdi vil inputtet lysniveau have (op til 255). Afhængigt af hvor lyse omgivelser robotten skal køre, kan det være nødvendigt at justere grænsen (i eksemplet her er grænsen 240).
Styr med lyd
For at styre din bil med lyd, skal du bruge micro:bit version 2. Din micro:bit er version 2, hvis den har takker i det guldfarvede bånd i bunden, og den har en højtaler på bagsiden.
Dette program vil få bilen til at køre fremad i ét sekund, når du laver en høj lyd. Hvis lyden ikke er høj nok, standser bilen.
Styr med en ekstra micro:bit
Hvis du har to micro:bits kan du bruge den ene i bilen og den anden til at styre bilen med. Vi skal derfor bruge et program til bilen og et andet program til vores "fjernbetjening". Fjernbetjeningen skal sende signaler til bilen, som bilens micro:bit kan reagere på og styre motorene. De to micro:bits kommunikerer ved hjælp af radiosignaler. Sørg for at indstille begge micro:bits til samme gruppe (kanal).
I dette eksempel, skal du vippe den fjernbetjenings-micro:bit frem, tilbage, til højre, til venstre, eller lade den ligge fladt for at få bilen til at dreje i samme retning som fjernbetjeningen. Til dette anvender vi micro:bitens indbyggede accelerometer.
Fjernbetjening
Bil
Styr bilen med sensorer
Når du har fået udstyret din bil med sensorer, kan vi bruge dem til at gøre vores bil "smartere" og fx køre rundt på egen hånd, hvor den kan undvige forhindringer eller følge en tegnet streg. Sensorer reagerer på omgivelserne og giver informationen videre til micro:biten, som micro:biten kan reagere på. De næste programmer giver eksempler på hvordan micro:bit-bilen kan styres ved hjælp af sensorer.
Styr med ultralydsensor
Ultralydsensoren er en afstandssensor. I programmet herunder læser vi sensorens værdi og gemmer den i variablen afstand. Hvis afstanden til en forhindring er mindre end 10 cm, vil bilen tilfældigt vælge at dreje til højre eller venstre i 1,5 sekunder. Hvis der ikke er noget foran bilen, vil den køre ligeud. Bilen starter ud med at have en fart på 0, så den ikke flyver afsted lige så snart programmet er downloadet til micro:biten. Farten styres med knapperne A og B.
Styr med magnet
Hall sensoren er en magnetsensor. Afhængigt af hvilken type Hall sensor du har, så reagerer de forskelligt på tilstedeværelsen af en magnet. En magnet har ofte to poler kaldet nord og syd. Hvis to magneter holdes mod hinanden med forskellige poler (nord-syd) tiltrækkes de, og hvis de holdes mod hinanden med samme pol (nord-nord eller syd-syd) frastødes de. Her er to forskellige typer hall sensorer:
Type 1: Sensoren reagerer kun på tilstedeværelsen af én bestemt pol. Hvis den anden pol holdes mod sensoren opfører sensoren sig som om ingen magnet er til stede. Den giver en digital værdi (0 eller 1).
Type 2: Sensoren reagerer uanset hvilken pol, der holdes mod den. Den giver en analog værdi (mellem 0 og 1023) afhængigt af, hvor tæt på magnet er på sensoren. Jo lavere værdi, desto tættere på magneten.
To programmer til at styre bilen med en magnet er givet her: en til hver type Hall sensor. Begge programmer vil få bilen til at køre, når en magnet holdes tæt på sensoren. Man styrer, hvilke hjul der skal køre, når magneten er tæt på med knapperne A (højre hjul), B (venstre hjul), og A+B (begge hjul).
Type 1
Type 2
Styr med linjefølger
Linjefølgeren er en infrarød sensor, der måler på hvor meget lys, der reflekteres. Lyse overflader reflekterer meget lys, mens mørke overflader reflekterer mindre lys. Dette kan vi bruge til at få robotten til at følge en mørk streg på en lys overflade.
Programmet her vil få bilen til at følge en sort streg på hvidt papir. Værdierne skal muligvis justeres alt efter kontrasten på underlag, der køres på og farven på stregen. Venstre linjefølger er tilsluttet P0, mens den højre er tilsluttet P1 i dette eksempel. Venstre motor er tilsluttet motor-port 1, og højre motor er tilsluttet port 2.
Opgaver
Se flere opgaver
Om teknologiundervisning
En frivillig forening der tilbyder teknologiske fritidsaktiviteter
Lorem ipsum dolor sit amet, consetetur sadipscing elitr, sed di am nonumy eirmod tempor invidunt ut labore et dolore magna aliquyam erat, sed diam voluptua. At vero eos et accusam et ju sto duo dolores et ea rebum. Stet clita kasd gubergren, no sea
Lorem ipsum dolor sit amet, consetetur sadipscing elitr, sed diam nonumy eirmod tempor invidunt ut labore et dolore magna aliquyam erat, sed diam voluptua. At vero eos et accusam et justo duo dolores et ea rebum. Stet clita kasd gubergren, no sea takimata sanctus est Lorem ipsum dolor sit